Kostas Alexis of the Autonomous Robots Lab, Department of Engineering Cybernetics at the Norwegian University of Science and Technology, explores the use of autonomous robotics for inspection operations
Inspection operations maintain a crucial role within our societies. Industrial inspection is essential to ensure the safety of critical assets such as underground mines, maritime structures, power plants, and aerospace facilities.
Notably, the costs associated with such inspection operations can be immense, while the underlying activities often expose humans to various risks and hazards.
Inspection operations for the maritime sector
Let us consider, for example, the case of inspecting enclosed spaces for the maritime sector, such as ship ballast water tanks and cargo holds.
With the world greatly relying on maritime transport and other marine structures, human surveyors must deal with a fleet involving more than 100,000 ships as per the “Handbook of Statistics 2022” of the United Nations Conference on Trade And Development.
During such inspections, surveyors inspect within dangerous, confined, enclosed and GPS/GNSS-denied environments that are hard to access, difficult to traverse, with low-light and slippery surfaces, while some of the areas may have low oxygen levels.
Reflecting these challenges, the European Maritime Safety Agency reports many accident conditions even with anchored ships. Considering the above and other similar examples across application domains (e.g., Figure 1), it comes as no surprise that robots have long been sought as the ultimate solution for automating inspections, eliminating risks for human personnel, and minimising the associated costs, while also significantly reducing possible dead-time of the assets involved.
Significant progress has been registered towards that goal. Robotic systems of diverse configurations, on the ground, in the air and in the water, are currently being used to either complement or partially replace human-based inspection operations in diverse industries. A galaxy of different robotics for inspection operations, therefore, exists in the market. Nevertheless, two limiting observations are pertinent across most such utilisations of robotic technologies.
Limitations to the use of robotics for inspection operations
First, teleoperation or some other form of densely human-supervised methodology is typically still employed for the robots to execute inspections. Second, robotics for inspection operations are not always reliable, especially in the most challenging environments, which implies that human surveyors often must still be on-site. These factors limit the potential benefits offered by robotics for inspection operations.
However, the current limitations of the state-of-the-art and industry adoption can be overcome. At the epicentre of solving the underlying technological challenges and enabling autonomy in diverse industrial inspections anywhere and subject to any conditions are two research directions, namely:
1. Enabling resilient robotic autonomy
First and foremost, robots must operate autonomously in all applicable environments and conditions relevant to industrial inspection. Settings such as ship ballast water tanks, underground mines or oil and gas facilities present strenuous navigation challenges. Those areas are GPS/ GNSS-denied and often present sensor degradation (e.g., the presence of obscurants such as dust and smoke).
At the same time, they involve geometries that are highly complex, often large-scale but also narrow requiring multi-storey navigation and traversing through hard-to-access passages such as manholes. This calls for fundamental contributions towards resilient robotic autonomy.
Autonomous systems must present five instrumental virtues, namely:
- a) resourcefulness in how they combine and fuse their resources to execute their mission
- b) redundancy across their components, c) robust performance across conditions
- d) effective response to disturbances and uncertainties, and the ability of; e) recovery from strenuous events.
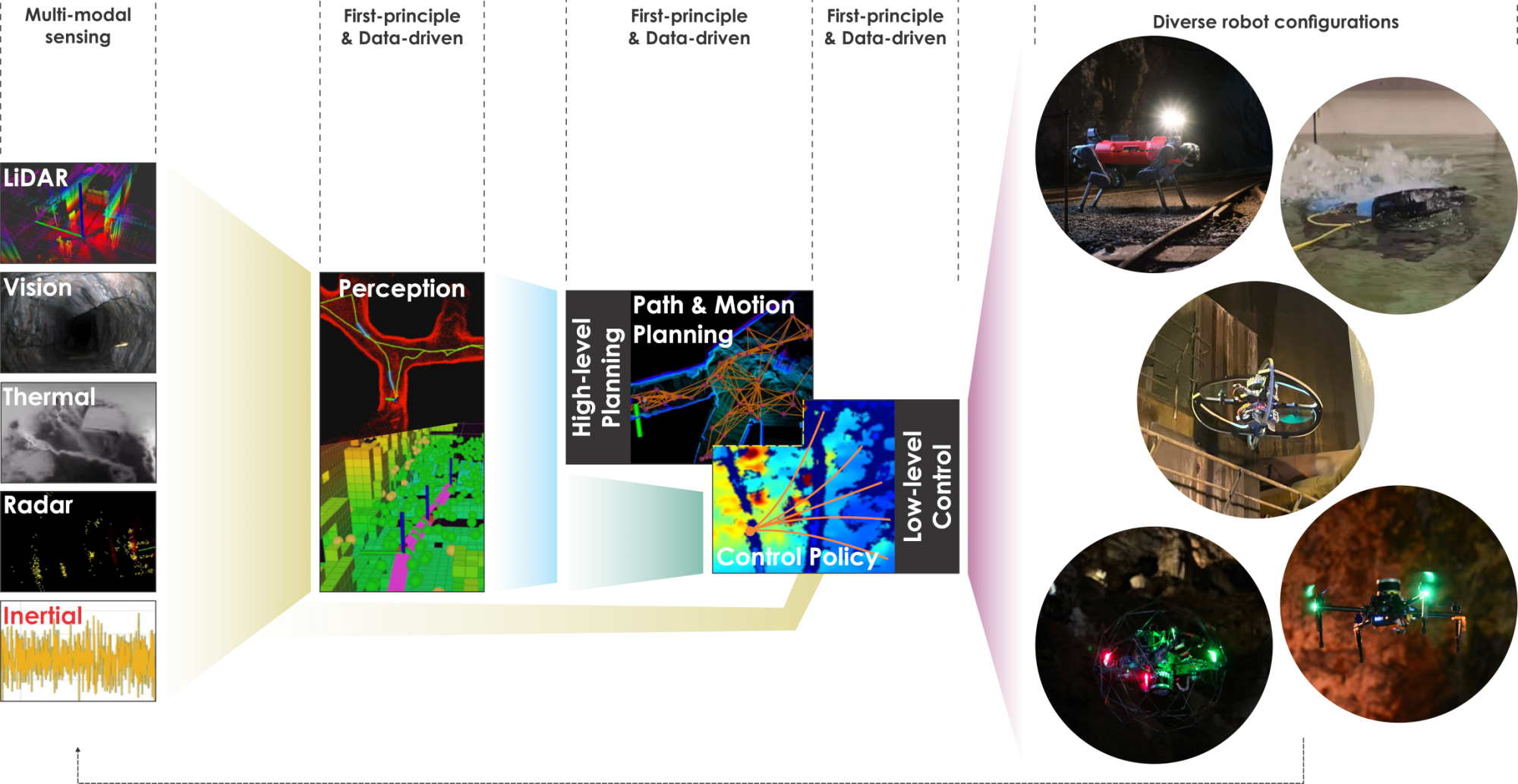
To that end, progress in the core technologies of a) multi-modal robotic perception, b) multi-objective path planning, and c) learning-based high-speed navigation subject to uncertainties and disturbances is necessary.
Developments in this direction are the key to eliminating the need for outsourcing navigation intelligence and planning inspection activities to human pilots and other means of teleoperation. Figure 2 presents an overview of the main functional blocks of robotics for inspection operations, with resilience being a goal that must be instilled within and across their inter-dependencies.
2. Facilitating semantically driven reasoning
Beyond the core necessity of resilient autonomy, inspection operations of high quality also require the transition from robots that “sense” and “map” the world to robots that also “reason” about it. Specifically, this refers to semantics-driven reasoning tailored to industrial inspection.
This, for example, can enable a robot to reason that a certain structural component (e.g., a ballast tank web frame) necessitates specific inspection behaviours and has a specific relative value for the quality of an inspection. Such semantics must be detected, localised, and exploited by informed planning algorithms onboard the robotic systems.
Projects serving to push robotic technology for inspection operations forward
Fortunately, the above directions are heavily investigated by the community. A host of projects or coordinated activities, such as the DARPA Subterranean Challenge, serve to push technology forward. Furthermore, the practice of open-sourcing results is widely adopted within the robotics community, accelerating the pathways to innovation and technological maturity.
It is thus clear that robotics for inspection operations will sooner rather than later present the potential to undertake complex inspections in diverse industrial – and natural – environments with full autonomy and mission completeness.
Both academia and industry and their synergy, have a core role to play towards this exciting goal that pushes forward the vision of ubiquitous utilisation of robotics for inspection operations.

This work is licensed under Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International.